|
Ziyun (Claude) Wang I'm an Assistant Professor at the Department of Electrical and Computer Engineering at Johns Hopkins University. I received my Ph.D. from the GRASP Laboratory at the University of Pennsylvania, advised by Professor Kostas Daniilidis. I received my B.S. in Computer Science from Rice University and M.S.E in Robotics from Penn. Previously, I was a research intern at Samsung AI Center New York, where I worked with Professors Sebastian Seung, Daniel Lee, and Volkan Isler. I did my most recent internship at the Apple Vision Product team, working on the Vision Pro. Email / CV / Google Scholar / X |

|
AnnouncementsI joined the Department of Electrical and Computer Engineering at Johns Hopkins University as an Assistant Professor. I am currently recruiting Ph.D. students for Spring and Fall 2026. If you're interested in real-time perception, learning for robotics, or neuromorphic computing, please email me at claude.w@jhu.edu with the subject line: [PhD Application 2026] Your Name Please include your CV, transcript (unofficial is fine), and a short statement of interest or description of your research background. |
News & Updates
|
ResearchMy main research interests are event-based vision, 3D computer vision and robotics. In particular, I work on motion and scene understanding of highly dynamic scenes. My research projects range from fundamental geometry problems in event-based vision to applications of the event sensors in real robots. |
|
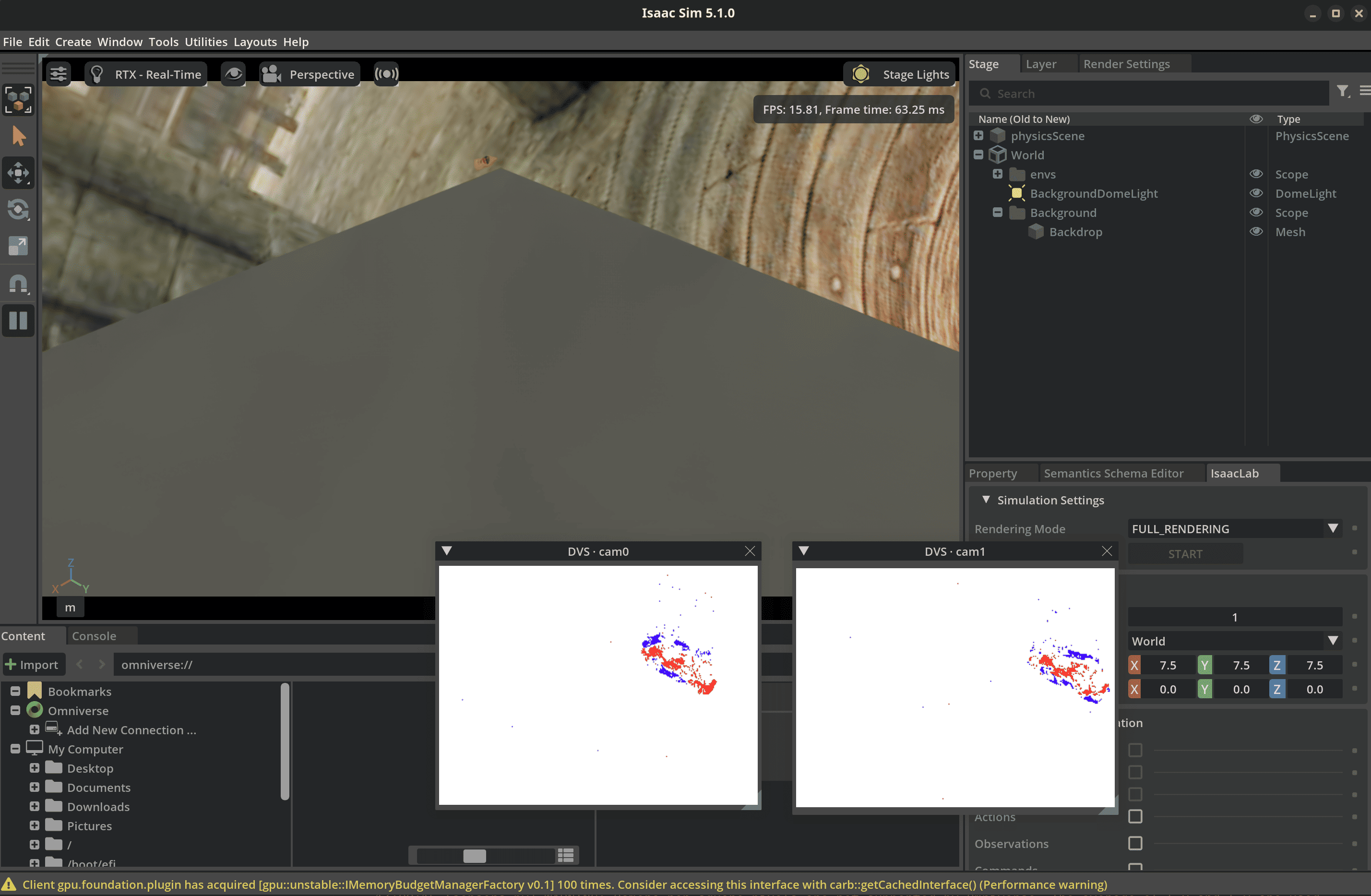
EVIS: A Physics-Grounded Event Camera Plugin for NVIDIA Isaac Sim
Linli Shi, , Ziyun Wang Open-source software, 2026 Code / Technical report High-rate event camera simulation accelerated by motion-vector frame interpolation, with HDR support, sensor noise models, motion blur, and tools for downstream training. |
|
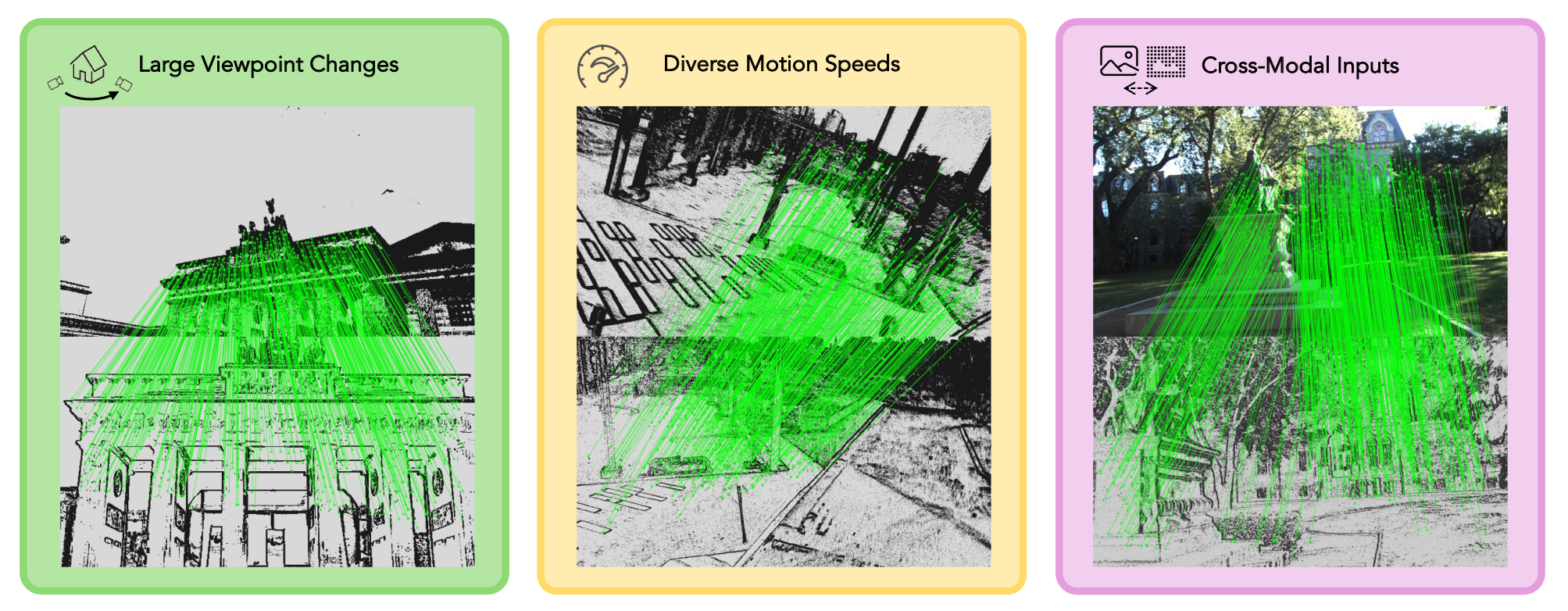
Match-Any-Events: Zero-Shot Motion-Robust Feature Matching Across Wide Baselines for Event Cameras
, , Kostas Daniilidis, Ziyun Wang European Conference on Computer Vision (ECCV), 2026 Code / Paper A zero-shot event feature matcher designed for large viewpoint changes and motion distortions, supporting event-to-event and cross-modal matching. |
|
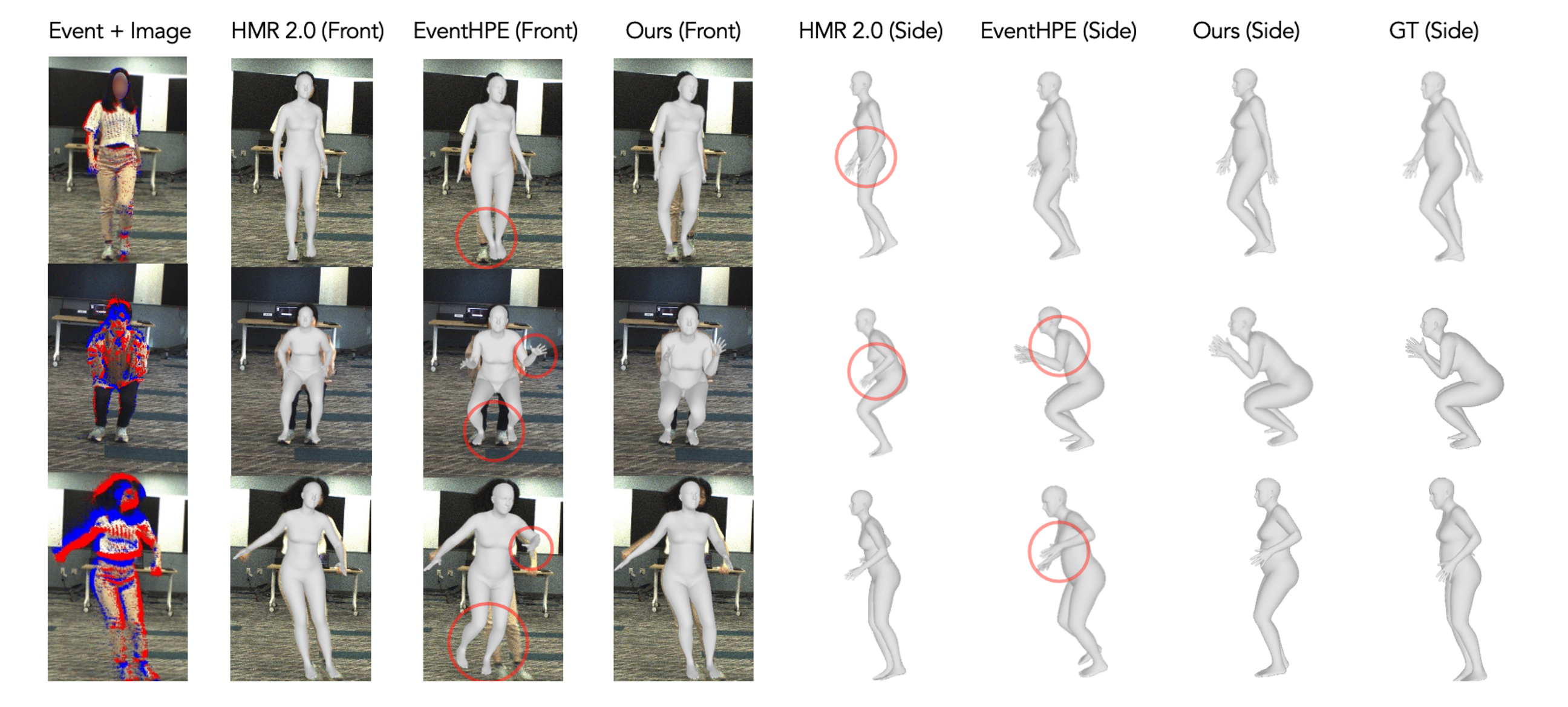
Continuous-Time Human Motion Field from Event Cameras
Ziyun Wang, , , , International Conference on Computer Vision (ICCV), 2025 Project page / Paper
|
|
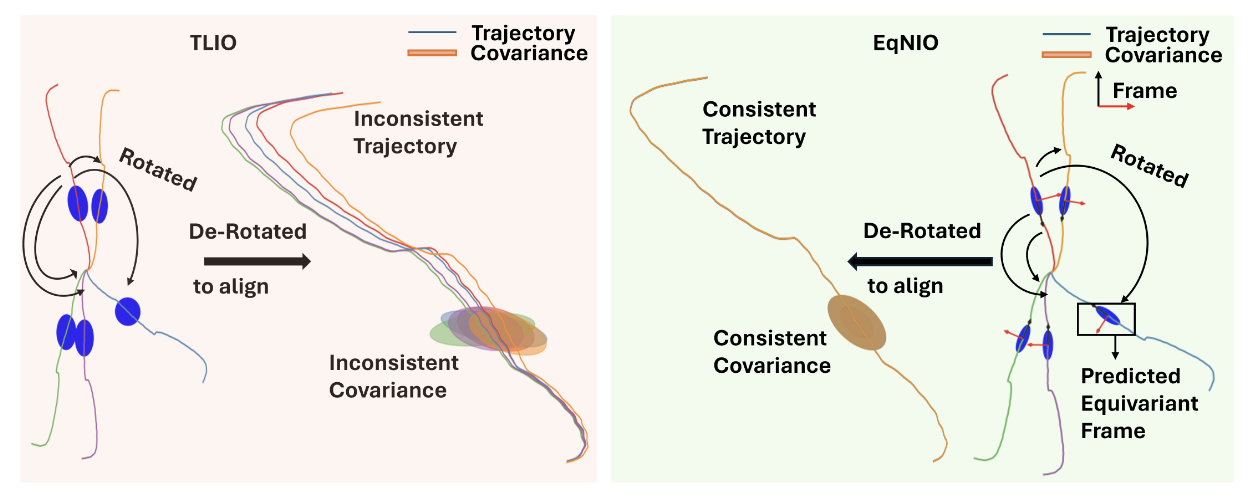
EqNIO: Subequivariant Neural Inertial Odometry
, , Ziyun Wang_, , International Conference on Learning Representations (ICLR) 2025 Code / Paper
|
|
Event-based Continuous Color Video Decompression from Single Frames
Ziyun Wang, , , , , Conference on Computer Vision and Pattern Recognition (CVPR), Event-based Vision Workshop 2025 Project page / Paper
|
|
Un-EVIMO: Unsupervised Event-based Independent Motion Segmentation
Ziyun Wang, , European Conference on Computer Vision (ECCV), 2024 Project page / Paper
|
|
Motion-prior Contrast Maximization for Dense Continuous-Time Motion Estimation
, Ziyun Wang, , , , European Conference on Computer Vision (ECCV), 2024 Project page / Paper
|
|
TRAM: Global Trajectory and Motion of 3D Humans from in-the-wild Videos
, Ziyun Wang, , European Conference on Computer Vision (ECCV), 2024 Project page / Paper
|
|
|
Track Everything Everywhere Fast and Robustly
, , Ziyun Wang, , European Conference on Computer Vision (ECCV), 2024 Project page / Paper
|
|
M3ED: Multi-Robot, Multi-Sensor, Multi-Environment Event Dataset
, , Ziyun Wang, , , , , , Event-based Vision Workshop, CVPR 2023 Project page / paper
|
|
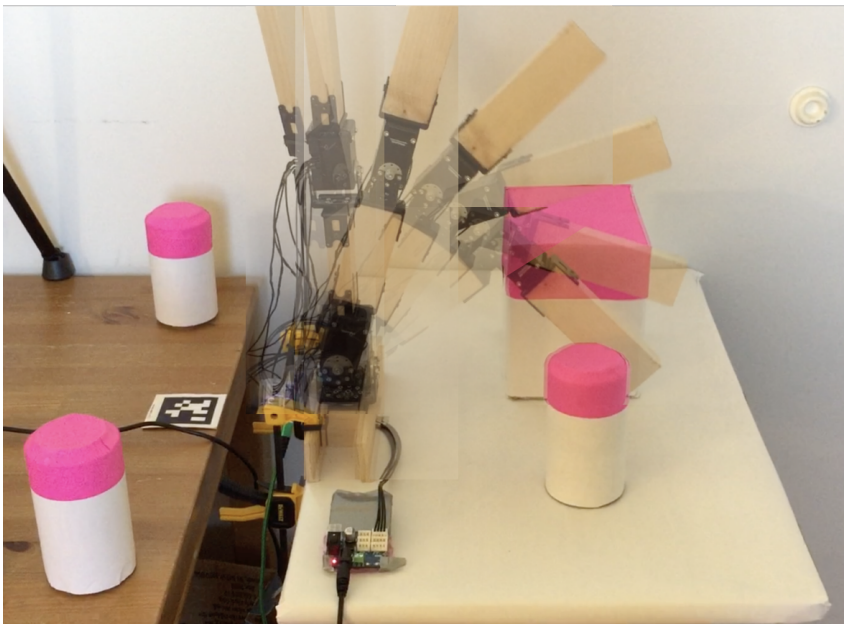
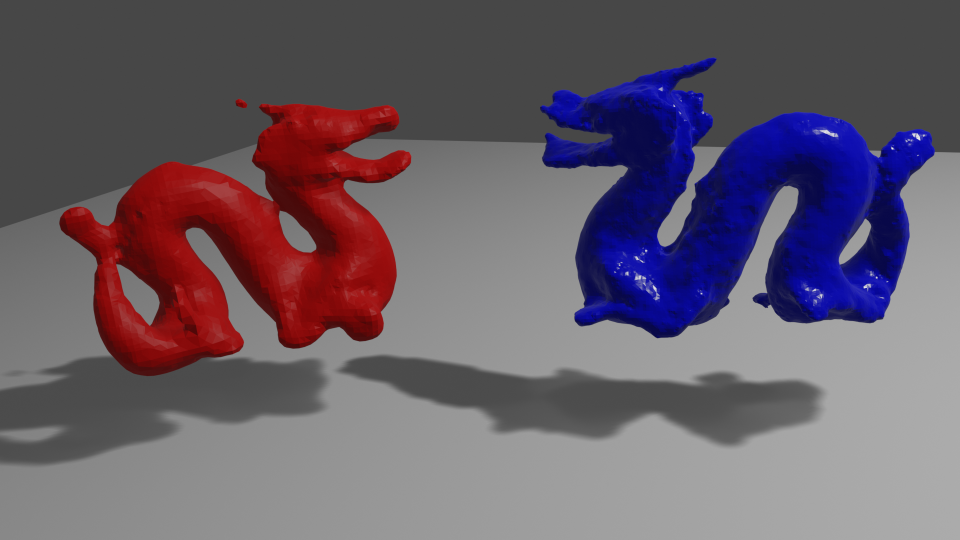
EvAC3D: From Event-Based Apparent Contours to 3D Models via Continuous Visual Hulls
Ziyun Wang*, , European Conference on Computer Vision (ECCV), 2022 (Oral Presentation, 2.7% Top Papers) Project page / Paper
|
|
|
EV-Catcher: High-Speed Object Catching Using Low-Latency Event-Based Neural Networks
Ziyun Wang*, , , , , , , , IEEE Robotics and Automation Letters (RA-L), 2022 Paper
|

|
Eventgan: Leveraging large scale image datasets for event cameras
, Ziyun Wang, , , IEEE International Conference on Computational Photography (ICCP), 2021 Paper / Code
|
|
Learning to generate cost-to-go functions for efficient motion planning
, , Ziyun Wang, , Experimental Robotics: The 17th International Symposium, 2021 Paper
|
|
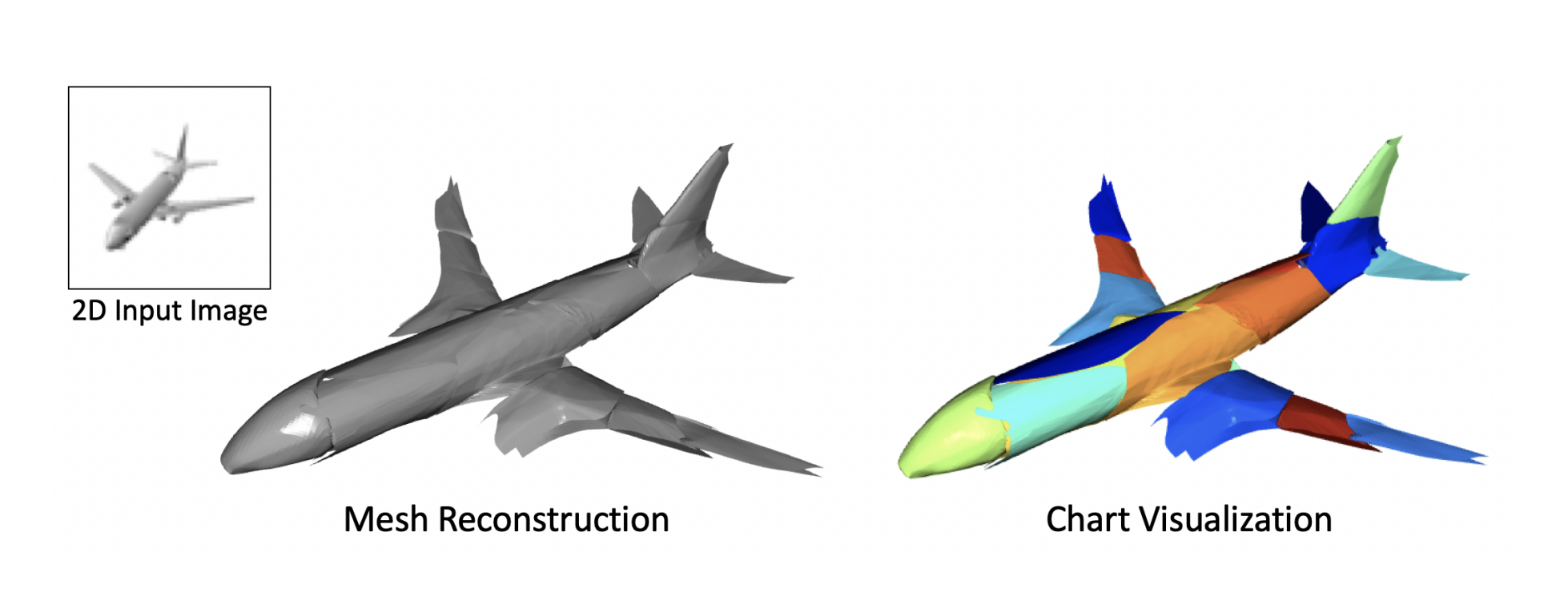
Surface HOF: Surface Reconstruction from a Single Image Using Higher Order Function Networks
Ziyun Wang, , IEEE International Conference on Image Processing (ICIP), 2020 Paper
|
|
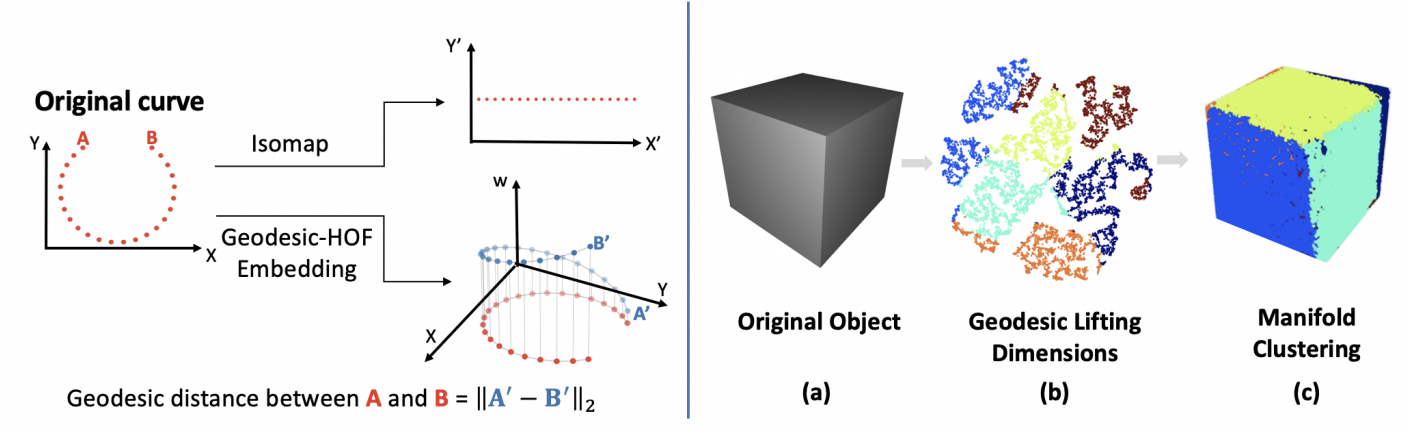
Geodesic-HOF: 3D Reconstruction Without Cutting Corners
Ziyun Wang, , , AAAI Conference on Artificial Intelligence, 2021 Paper
|
|
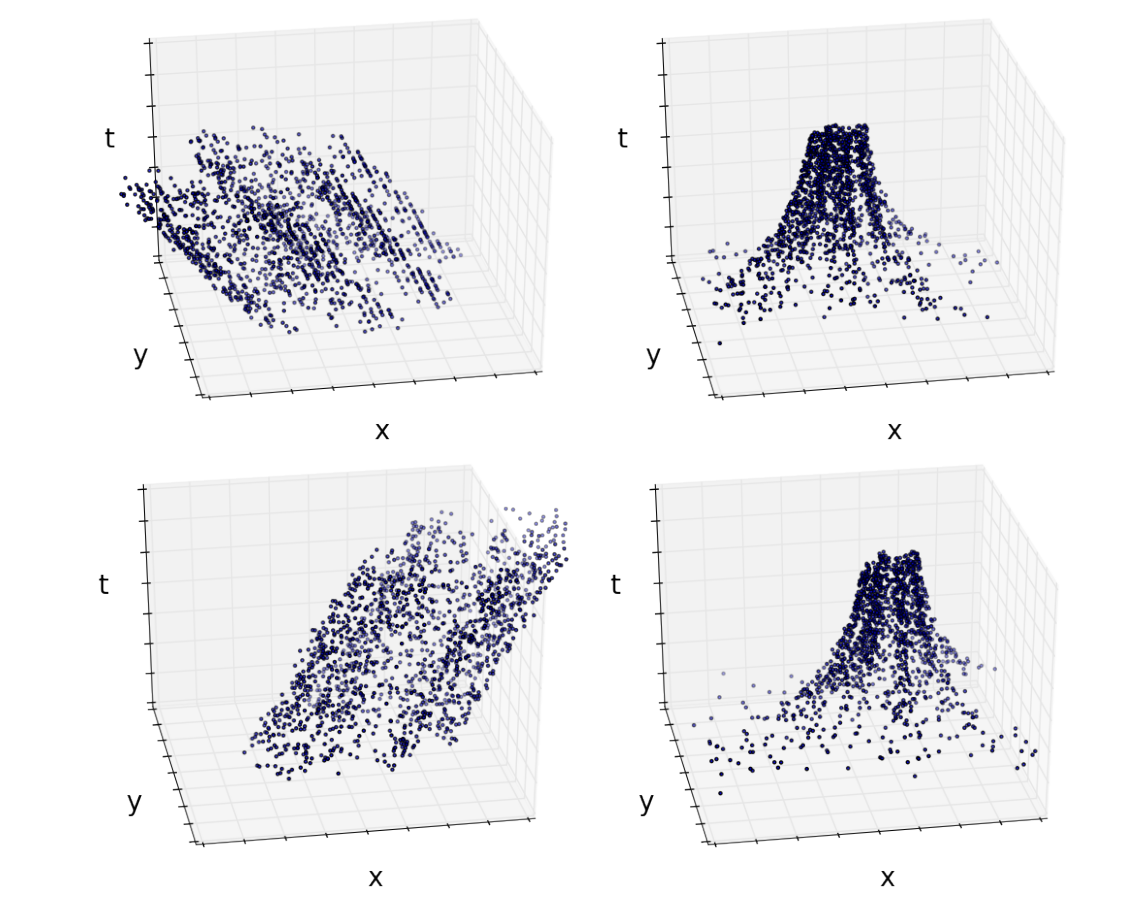
Motion Equivariant Networks for Event Cameras with the Temporal Normalization Transform
, Ziyun Wang, Paper
|
|
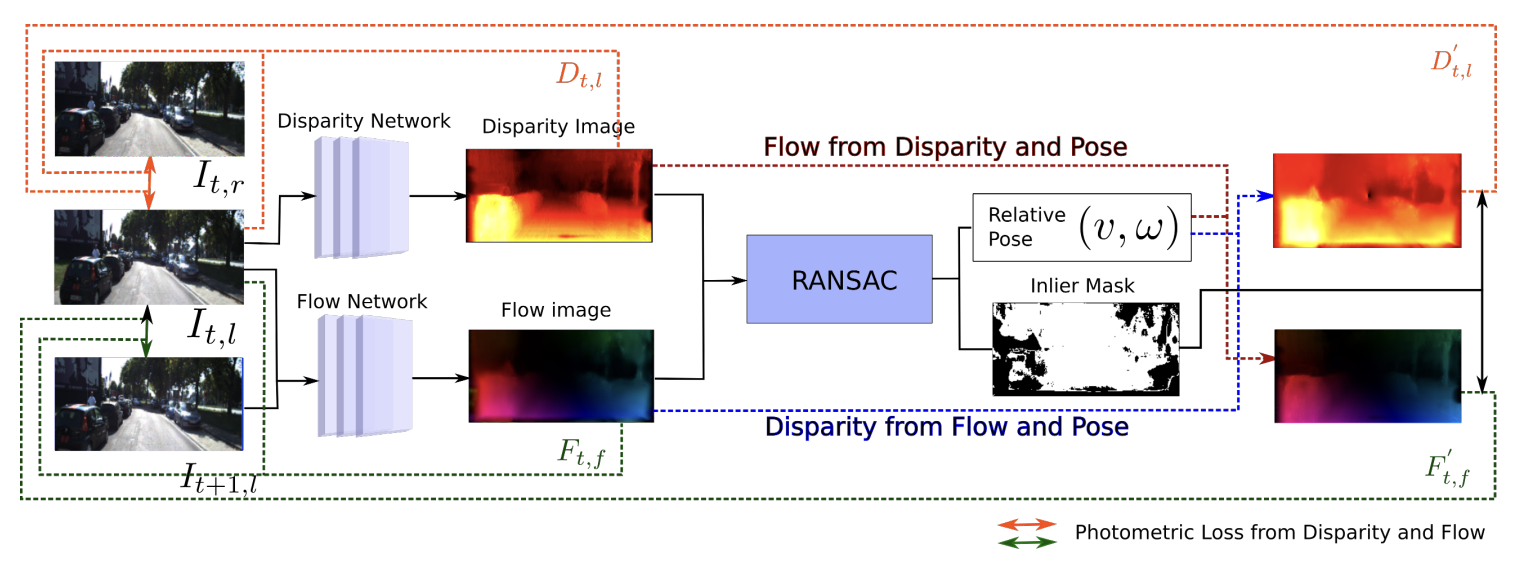
Robustness Meets Deep Learning: An End-to-End Hybrid Pipeline for Unsupervised Learning of Egomotion
, , Ziyun Wang, , Workshop on Deep Learning for Semantic Visual Navigation, CVPR 2019 Paper
|